


步進馬達測試系統

荷重感測器 & 滑輪規格如下:
| 型號 | 荷重感測器 | 滑輪半徑 (mm) | ||||
|---|---|---|---|---|---|---|
| 直接繞在 軸上*1 |
2.5mm | 5mm | 10mm | 20mm | ||
| JP-R5N | 0.5N | - | 1.25mNm | 2.5mNm | 5mNm | 10mNm |
| JP-1N | 1N | - | 2.5mNm | 5mNm | 10mNm | 20mNm |
| JP-2N | 2N | - | 5mNm | 10mNm | 20mNm | 40mNm |
| JP-5N | 5N | - | 12.5mNm | 25mNm | 50mNm | 100mNm |
| JP-10N | 10N | - | 25mNm | 50mNm | 100mNm | 200mNm |
| JP-20N | 20N | - | 50mNm | 100mNm | 200mNm | 400mNm |
扭力 = 荷重感測器(N) × 滑輪半徑(mm)
*1: 扭力會與馬達軸心的直徑有關。
*1: 扭力會與馬達軸心的直徑有關。
系統說明:
本系統利用絲掛方式,自動量測步進馬達的引入(Pull-in)&脫出(Pull-out)扭力曲線,對於步進馬達測試而言,這是最成熟且精度最高的量測方法。
- 引入扭力(Pull-in torque):
馬達從靜止狀態開始,啓動後達到所要求同步轉速的最大扭力。 - 脫出扭力(Pull-out torque):
馬達在正常狀態下運轉時,負載逐漸加重進而導致馬達失步而停止轉動的最大扭力。
特點描述:
- 極小的慣量扭力及耦合損耗:
通過採用普羅尼(Prony)方式制動,量測時不受測試系統的慣性力矩和耦和損耗影響特別是在引入扭力(Pull-in)測試時,更能顯示出這個優點。 - 廣泛的測量範圍:
六種模式的傳感器,從0.5N至20N,容許大範圍且高精度的測量。
通過選擇傳感器和滑輪,可以量測在0.1~400mNm以下。 - 監測分析容易:
即時在螢幕上顯示測試效果,數據資料可以轉成Excel檔,方便自行編排報表。
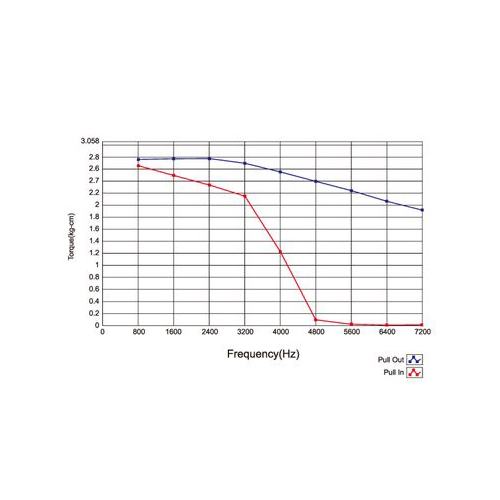
實測範例:
- Pull-in及Pull-out測試資料
- (x軸:頻率 / Y軸:扭力)
系統規格如下:
| 剎車方式 | Prony braking |
|---|---|
| 荷重感測器 | Six types: 0.5N, 1N, 2N, 5N, 10N, 20N |
| 傳感器靈敏度 | DC 2 V/ rating |
| 扭矩測量精度 | Within ± 1% of torque range |
| 最大允許負載 | 200% of Sensor rating |
| 扭力量測範圍 | 扭力=荷重感測比例 X 滑輪半徑 |
| 驅動頻率範圍 | 16-50,000 Hz |
| 驅動信號 | 方波 (duty 1:1), TTL電壓信號 or open-collector signal |
| 軟體操作系統 | Microsoft Windows |
| 使用電源 | Single-phase AC100-120V ± 10%,50/ 60 Hz |
| Single-phase AC200-240V ± 10%,50/ 60 Hz |





